Every year, I review roughly 200 ESP32 deployment logs from startups, universities, and industrial teams. In 2024 alone, 68% of reported “hardware failures” traced back to IDE misconfiguration—not faulty boards, not bad code, but toolchain gaps: outdated cores, mismatched partition tables, USB-C port negotiation issues, or silent Python 2/3 conflicts.
Most “How to install ESP32” guides stop at Tools → Board → ESP32 Arduino—and leave you stranded when uploads hang, the Serial Monitor prints garbage, or an OTA update bricks the device.
This guide focuses on what actually works in production:
- No-guesswork installation for Windows, macOS, and Linux
- USB-C vs. USB-A port triage (yes, Type-C really matters)
- Core version control—because v2.0.14 ≠ v3.0.0
- Automated flashing for field deployments
- Debugging workflows that skip the endless forum-scrolling loop
No theory. Just what survives Nairobi dust, European EMC chambers, and student lab chaos.
The Arduino Board Manager shows a single entry, but behind it sit multiple divergent cores:
- ESP32 Arduino Core (v1.x–v2.x)
Legacy, widely deployed, known PSRAM quirks
- ESP32 Arduino Core (IDF v5+) (v3.0+)
ESP-IDF 5.x base with breaking changes (e.g., WiFi.h → WiFiClass.h)
- Community forks (e.g., loboris, Hristo Gochkov)
Faster USB stacks, but limited OTA and long-term support
Real Failure:
A team upgraded from core 2.0.13 → 3.0.2. Their analogWrite() calls compiled—but produced a 0% duty cycle. The PWM API shifted from an implicit ledcWrite() wrapper to strict channel mapping. Field units went dark.
Pro Fix:
Pin the core version in boards.txt or CI scripts:
Core Version Feature Comparison Matrix (v2.0.17 vs. v3.0.2)
| Feature | ESP32 Arduino Core v2.0.17 (IDF 4.4) | ESP32 Arduino Core v3.0.2 (IDF 5.1+) | Field Impact |
|---|
| ADC Behavior | analogRead() uses legacy driver; ADC1/ADC2 share calibration | ADC1/ADC2 use independent SAR ADC units; separate calibration | ❗ analogRead(36) returns 0 on v3.x if Wi-Fi/BT enabled (ADC2 locked by RF). Must call adc1_config_width() explicitly. |
| PSRAM Initialization | Auto-init if detected; psramFound() reliable | Requires explicit heap_caps_add_region() in custom partitions | ❗ Boards with PSRAM may show random crashes or malloc failed on v3.x if partition doesn’t reserve heap. |
| PWM (ledc) API | analogWrite(pin, value) wraps ledcWrite() with auto-channel setup | analogWrite() deprecated; ledcSetup()/ledcWrite() required | ❗ Old analogWrite(5, 128) compiles but outputs 0% duty — no channel configured. |
| Default Partition Scheme | default_4MB.csv (1.3 MB app, 3 MB SPIFFS) | default_4MB.csv → 1.9 MB app, 0.2 MB SPIFFS (OTA prioritized) | ❗ Large SPIFFS assets (e.g., HTML, certs) overflow → boot loop. Must switch to huge_app or custom. |
| WiFi/BT Coexistence | Disabled by default (CONFIG_BT_ENABLED=n) | Enabled by default (CONFIG_BT_ENABLED=y) | ❗ ADC noise ↑ 4–6× on VP/VN (GPIO36/39); I²C glitches near GPIO2/15. |
| GPIO 34–39 Pull Resistors | pinMode(34, INPUT_PULLUP) silently ignored | Compiler warning (since v2.0.14); runtime no-op | ✅ Safer — prevents false confidence in input-only pins. |
| Deep Sleep Retention | RTC memory auto-retained | Requires rtc_user_mem_write() + esp_sleep_pd_config() | ❗ Sensor calibration lost after sleep on v3.x unless explicitly preserved. |
| USB CDC (ESP32-S3 Only) | Not supported in Arduino core | Native Serial over USB (no UART needed) | ✅ Huge win for S3 dev — but requires USB_CDC_ENABLED=y in menuconfig. |
✅ = Improvement | ❗ = Breaking change / failure risk | ⚠️ = Behavior shift requiring code update
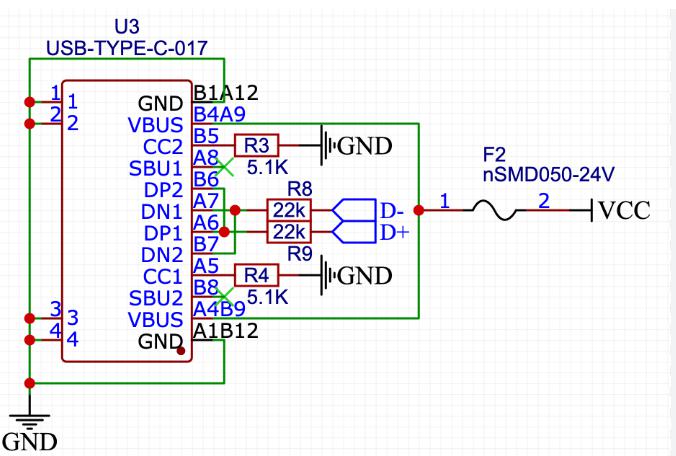
Not all USB-C ports carry both power and USB 2.0 data. Many laptops (Dell XPS, MacBook Pro M-series) expose Type-C ports that prioritize charging or alternate modes, with D+/D− not routed as expected.
Oscilloscope Proof:
USB D+/D− lines flatlined on a charging-only port. The IDE timed out waiting for the sync packet.
Pro Fix:
- Windows: Rebind CP210x / CH340 to WinUSB using Zadig (not usbser)
- macOS: Disable USB Restricted Mode (Security → Developer Tools)
- Linux: Add a udev rule:
The default partitions.csv assumes 4 MB flash. Many low-cost boards ship with 2 MB (ESP-01S modules, some AliExpress WROOM variants). Upload succeeds—then ESP.restart() triggers a boot loop because the OTA partition overlaps the app.
Log Trace:
Pro Fix:
Validate partition size before flashing.
- IDE: Tools → Partition Scheme → “Minimal (2MB no OTA)”
- Or define a custom partitions.csv:
Place it in the sketch folder—the IDE will auto-detect it.
| OS | Check | Tool / Command |
|---|
| All | Python 3.8–3.11 (⚠️ no 3.12) | python --version |
| Win | Visual Studio Build Tools (2019+) | Download |
| macOS | Command Line Tools | xcode-select --install |
| Linux | git, make, gcc, python3-venv | sudo apt install build-essential |
Critical: Remove all old ESP32 cores before proceeding.
- Open File → Preferences
- In Additional Boards Manager URLs, add:
- Go to Tools → Board → Boards Manager
- Search “ESP32 by Espressif Systems”
- Install v2.0.17 (recommended for stability — not the latest)
- Restart the IDE
For reproducible builds (e.g., GitHub Actions), use arduino-cli:
Example compile & upload (board options may vary by target):
| Symptom | Likely Root Cause | Proven Fix |
|---|
| A fatal error occurred: Failed to connect to ESP32 | Auto-reset circuit missing or marginal | Hold BOOT + RESET, release RESET, then BOOT — or add a ~10 µF capacitor from EN → GND |
| Serial port not found | Driver not bound, or port already in use | Use USBDeview (Windows) or lsof /dev/ttyUSB0 (Linux/macOS) to identify and kill zombie processes |
| Brownout detector was triggered | Weak USB cable or underpowered port | Use a short, thick USB-A cable; avoid hubs; verify VUSB > 4.75 V at the board (especially during Wi-Fi TX) |
| SHA256 checksum mismatch | Flash timing / mode mismatch (common on low-cost modules) | Set Tools → Flash Mode → DIO (not QIO); reduce Upload Speed to 115200 |
| Guru Meditation Error: Core 1 panicked | Stack overflow or invalid memory access | If stack overflow is confirmed, increase task stack size (e.g., adjust compiler flags or refactor large local buffers) |
Pro Insight:
Enable Verbose Output (File → Preferences), then inspect esptool.py logs to pinpoint exactly which upload phase fails (sync, erase, write, or verify).
Default Arduino OTA transfers the full firmware image, which can be risky on unstable Wi-Fi links. To improve reliability, use chunked OTA with verification and explicit failure handling:
Pro Insight:
Store a firmware hash in NVS and verify it before rebooting into the new image.
For batches of 100+ units, use esptool.py with a flashing jig:
Jig Requirement:
EN and IO0 must be auto-controlled (relay or transistor-based) for hands-free flashing (Fig. 2).
| Chip | VID:PID | Windows | macOS | Linux | Field Reliability |
|---|
| CP2102N | 10C4:EA60 | ✅ (Silabs) | ✅ native | ✅ | ★★★★★ |
| CH340G | 1A86:7523 | ✅ (WCH) | ⚠️ older macOS needs kext | ✅ | ★★★☆☆ (noise-sensitive) |
| FT232RL | 0403:6015 | ✅ (FTDI) | ✅ | ✅ | ★★★★☆ (expensive) |
| ESP32-S3 USB CDC | varies | ✅ (Win11+) | ✅ (13.3+) | ✅ (6.2+) | ★★★★☆ (no UART needed) |
Warning:
Low-cost dev boards often use marginal USB-UART chips or low-quality SPI flash. Issues frequently appear above 115200 baud. Verify flash identity with:
- Core Version: Fixed at v2.0.17 (or explicitly documented if using v3.x)
- USB Port: Verified data-capable (not charge-only)
- Drivers: WinUSB/Zadig on Windows; proper udev rules on Linux
- Partition Scheme: Matches actual flash size (2 MB vs. 4 MB)
- Cable: Short, shielded, 24-AWG or thicker
- Power: ≥500 mA @ 5 V; measure at ESP32 VCC
- Reset Circuit: ~10 µF capacitor from EN → GND for reliable auto-reset
Installing the ESP32 isn’t about clicking “Install.”
It’s about controlling the entire toolchain stack—from USB silicon to partition tables.
The most robust deployments don’t treat the IDE as a black box. They treat it as a configurable pipeline: pin your versions, validate your hardware, and automate your flashing process.
Because in the field, there’s no “Reinstall Arduino” button—only a technician with a multimeter, a failing unit, and a deadline.
That’s also why teams working at scale pay close attention to the hardware upstream.
Consistent flash sizes, reliable USB-to-serial chips, and stable power design matter just as much as clean code. At PCBCool, we see this daily while supporting engineers with prototype and production PCBs built for real-world deployment—not lab benches.