Jedes Jahr überprüfe ich etwa 200 ESP32-Deployment-Protokolle von Start-ups, Universitäten und Industrieteams. Allein im Jahr 2024, 68% der gemeldeten “Hardwarefehler” ließen sich auf eine fehlerhafte IDE-Konfiguration zurückführen– keine fehlerhaften Boards, kein schlechter Code, sondern Lücken in der Toolchain: veraltete Kerne, inkompatible Partitionstabellen, Probleme bei der Aushandlung von USB-C-Ports oder stille Konflikte zwischen Python 2 und 3.
Die meisten Anleitungen zur Installation von ESP32 brechen bei Werkzeuge → Platine → ESP32 Arduino ab und lassen Sie im Stich, wenn Uploads hängen, der serielle Monitor Müll ausgibt oder ein OTA-Update das Gerät unbrauchbar macht.
Dieser Leitfaden konzentriert sich auf das, was in der Produktion tatsächlich funktioniert:
- No-Guesswork-Installation für Windows, macOS und Linux
- USB-C vs. USB-A Port-Triage (ja, Typ-C ist wirklich wichtig)
- Kernversionskontrolle – denn v2.0.14 ≠ v3.0.0
- Automatisches Blinken für Feldeinsätze
- Fehlersuche bei Arbeitsabläufen, die die endlose Forums-Scroll-Schleife überspringen
Keine Theorie. Nur das, was dem Staub Nairobis, europäischen EMV-Kammern und dem Studentenlabor-Chaos standhält.
Der Arduino Board Manager zeigt nur einen einzigen Eintrag, aber dahinter verbergen sich mehrere divergente Kerne:
- ESP32 Arduino Core (v1.x–v2.x)
Legacy, weit verbreitet, bekannte PSRAM-Eigenheiten
- ESP32 Arduino Core (IDF v5+) (v3.0+)
ESP-IDF 5.x Basis mit signifikanten Änderungen (z. B. WiFi.h → WiFiClass.h)
- Community-Forks (z. B. loboris, Hristo Gochkov)
Schnellere USB-Stacks, aber eingeschränkte OTA- und Langzeitunterstützung
Echte Enttäuschung
Ein Team wurde von Core aktualisiert 2.0.13 → 3.0.2. Ihre analogWrite() Aufrufe wurden kompiliert – produzierten aber eine 0%-Einschaltdauer. Die PWM-API wurde von einer impliziten ledcWrite()-Wrapper-Funktion zu einer strikten Kanalzuordnung geändert. Die Feld-Einheiten funktionierten nicht mehr.
Pro Fix:
Fixieren Sie die Kernversion in boards.txt oder CI-Skripten:
Kerne-Version-Feature-Vergleichsmatrix (v2.0.17 vs. v3.0.2)
| Merkmal | ESP32 Arduino Core v2.0.17 (IDF 4.4) | ESP32 Arduino Core v3.0.2 (IDF 5.1+) | Feldeinfluss |
|---|
| ADC Verhalten | analogRead() verwendet Legacy-Treiber; ADC1/ADC2 teilen sich die Kalibrierung | ADC1/ADC2 verwenden unabhängige SAR-ADC-Einheiten; separate Kalibrierung | ❗ analogRead(36) gibt auf v3.x 0 zurück, wenn Wi-Fi/BT aktiviert ist (ADC2 wird von RF gesperrt). Sie müssen adc1_config_width() explizit aufrufen. |
| PSRAM-Initialisierung | Automatische Initialisierung bei Erkennung; psramFound() zuverlässig | Erfordert explizite heap_caps_add_region() in benutzerdefinierten Partitionen | ❗ Boards mit PSRAM können zufällige Abstürze oder den Fehler „malloc failed“ unter v3.x aufweisen, wenn die Partition keinen Heap reserviert. |
| PWM (ledc) API | analogWrite(pin, value) umschließt ledcWrite() mit automatischer Kanal-Einrichtung | analogWrite() veraltet; ledcSetup()/ledcWrite() erforderlich | ❗ Der alte Befehl „analogWrite(5, 128)“ lässt sich zwar kompilieren, gibt jedoch den Tastgrad „0%“ aus – es ist kein Kanal konfiguriert. |
| Standard-Partitionierungsschema | default_4MB.csv (1,3 MB App, 3 MB SPIFFS) | default_4MB.csv → 1,9 MB App, 0,2 MB SPIFFS (OTA priorisiert) | ❗ Große SPIFFS-Assets (z. B. HTML, Zertifikate) überlaufen → Boot-Schleife. Muss auf huge_app oder custom umgestellt werden. |
| WLAN/BT-Koexistenz | Standardmäßig deaktiviert (CONFIG_BT_ENABLED=n) | Standardmäßig aktiviert (CONFIG_BT_ENABLED=y) | ❗ ADC-Rauschen steigt um das 4- bis 6-fache bei VP/VN (GPIO36/39); I²C-Glitsches in der Nähe von GPIO2/15. |
| GPIO 34–39 Pull-Widerstände | pinMode(34, INPUT_PULLUP) wurde stillschweigend ignoriert | Compiler-Warnung (seit v2.0.14); Laufzeit ohne Auswirkung | ✅ Sicherer — verhindert falsches Vertrauen in reine Eingabe-Pins. |
| Tiefschlaf-Gedächtniserhalt | RTC-Speicher automatisch beibehalten | Erfordert rtc_user_mem_write() + esp_sleep_pd_config() | ❗ Sensorkalibrierung geht nach dem Ruhezustand unter v3.x verloren, es sei denn, sie wird explizit beibehalten. |
| USB CDC (Nur ESP32-S3) | Nicht im Arduino-Kern unterstützt | Native serielle Kommunikation über USB (kein UART erforderlich) | ✅ Riesiger Sieg für die S3-Entwicklung – erfordert jedoch USB_CDC_ENABLED=y in menuconfig. |
✅ = Verbesserung | ❗ = Kritische Änderung / Fehlerrisiko | ⚠️ = Verhaltensänderung, die eine Codeaktualisierung erfordert
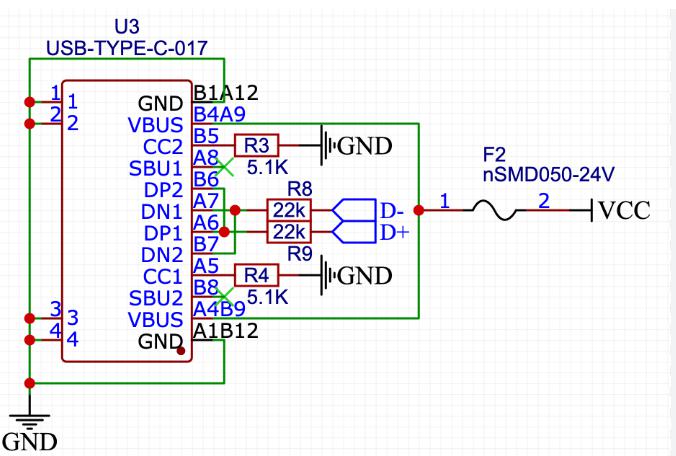
Nicht alle USB-C-Anschlüsse übertragen sowohl Strom als auch USB 2.0-Daten. Viele Laptops (Dell XPS, MacBook Pro M-Serie) bieten Typ-C-Anschlüsse, die das Aufladen oder alternative Modi priorisieren, wobei D+/D− nicht wie erwartet geroutet wird.
Oszilloskop-Nachweis:
Die USB D+/D− Leitungen waren bei einem reinen Ladeport flach. Die IDE hat die Zeitüberschreitung beim Warten auf das Sync-Paket erreicht.
Pro Fix:
- Fenster CP210x / CH340 mit Zadig auf WinUSB (nicht usbser) neu zuweisen
- macOS USB-eingeschränkten Modus deaktivieren (Sicherheit → Entwicklertools)
- Linux Fügen Sie eine udev-Regel hinzu:
Die Standard-Partitionen.csv geht davon aus 4 MB Flashspeicher. Viele preisgünstige Platinen werden mit 2 MB (ESP-01S Module, einige AliExpress WROOM Varianten). Der Upload gelingt – dann löst ESP.restart() eine Boot-Schleife aus, da die OTA-Partition mit der App überlappt.
Protokollverfolgung
Pro Fix:
Validieren Sie die Partitionsgröße vor dem Flashen.
- IDE: Werkzeuge → Partitionsschema → “Minimal (2 MB kein OTA)”
- Oder definieren Sie eine benutzerdefinierte partitions.csv:
Legen Sie es in den Sketch-Ordner – die IDE erkennt es automatisch.
| Betriebssystem | Prüfen | Werkzeug / Befehl |
|---|
| Einlass | Python 3.8–3.11 (⚠️ keine 3.12) | python --version |
| Gewinn | Visual Studio Build Tools (2019+) | Herunterladen |
| macOS | Befehlszeilenwerkzeuge | xcode-select --install |
| Linux | git, make, gcc, python3-venv | sudo apt install build-essential |
Kritisch: Entfernen Sie alle alten ESP32-Kerne, bevor Sie fortfahren.
- Öffnen Datei → Präferenzen
- In Zusätzliche Boardverwalter-URLs, hinzufügen:
- Gehe Werkzeuge → Platine → Platinen-Manager
- Suchen Sie nach “ESP32 von Espressif Systems”
- Installieren v2.0.17 (empfohlen für Stabilität – nicht die neueste)
- Starten Sie die IDE neu
Für wiederholbare Builds (z. B. GitHub Actions) verwenden Sie arduino-cli:
Beispiel Kompilieren & Hochladen (Board-Optionen können je nach Ziel variieren):
| Symptom | Wahrscheinliche Ursache | Nachgewiesene Lösung |
|---|
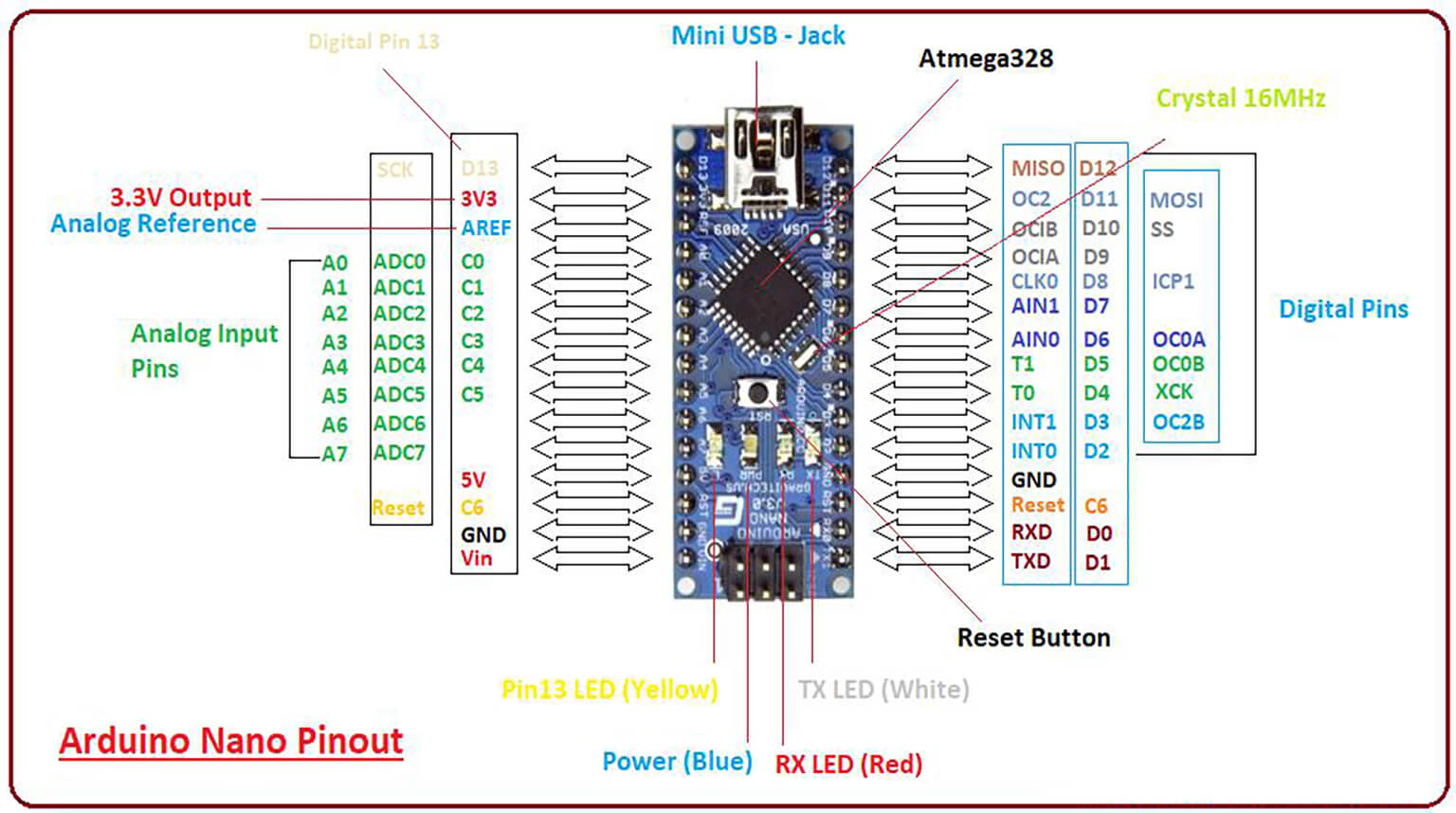
| Ein schwerwiegender Fehler ist aufgetreten: Verbindung zum ESP32 fehlgeschlagen | Autoresetschaltung fehlt oder ist grenzwertig | Halten STARTEN + ZURÜCKSETZEN, RESET, dann BOOT freigeben — oder fügen Sie einen Kondensator von ~10 µF hinzu von EN → DE |
| Serielle Schnittstelle nicht gefunden | Treiber nicht gebunden oder Port bereits belegt | Verwenden USBDeview (Windows) oder lsof /dev/ttyUSB0 (Linux/macOS) Zombie-Prozesse identifizieren und beenden |
| Der Schwachstromdetektor wurde ausgelöst | Schwaches USB-Kabel oder unterdimensionierter Port | Verwenden Sie ein kurzes, dickes USB-A-Kabel; vermeiden Sie Hubs; verifizieren Sie VUSB > 4,75 V Am Board (insbesondere während WLAN-TX) |
| Prüfsummen-Mismatch SHA256 | Flash-Timing/Modus-Fehlanpassung (häufig bei kostengünstigen Modulen) | Satz Werkzeuge → Flash-Modus → DIO (nicht QIO); reduzieren Upload-Geschwindigkeit zu 115200 |
| Guru-Meditationsfehler: Kern 1 in Panik geraten | Stack-Überlauf oder ungültiger Speicherzugriff | Falls ein Stack-Überlauf bestätigt wird, erhöhen Sie die Task-Stackgröße (z. B. durch Anpassung von Compiler-Flags oder Refactoring großer lokaler Puffer). |
Pro-Einblick
Ermöglichen Ausführliche Ausgabe (Datei → Einstellungen), dann die `esptool.py`-Logs überprüfen, um genau zu lokalisieren, welche Upload-Phase fehlschlägt (Sync, Erase, Write oder Verify).
Standard-Arduino-OTA überträgt das vollständige Firmware-Image, was bei instabilen WLAN-Verbindungen riskant sein kann. Zur Verbesserung der Zuverlässigkeit verwenden Sie OTAs mit Blockübertragung, Verifizierung und expliziter Fehlerbehandlung:
Pro-Einblick
Speichern Sie einen Firmware-Hash in NVS und überprüfen Sie ihn vor dem Neustart in das neue Image.
Für Chargen von 100+ Einheiten, verwenden Sie esptool.py mit einer Flash-Vorrichtung:
Jig-Anforderung
EN und IO0 müssen für ein freihändiges Blinken automatisch gesteuert werden (Relais- oder Transistorbasiert) (Abb. 2).
| Chip | VID:PID | Windows | macOS | Linux | Zuverlässigkeit im Feld |
|---|
| CP2102N | 10C4:EA60 | ✅ (Silabs) | ✅ Muttersprachler | ✅ | ★★★★★ |
| CH340G | 1A86:7523 | ✅ (WCH) | ⚠️ älteres macOS benötigt Kext | ✅ | ★★★☆☆ (geräuschempfindlich) |
| FT232RL | 0403:6015 | (FTDI) | ✅ | ✅ | ★★★★☆ (teuer) |
| ESP32-S3 USB CDC | variiert | (Win11+) | ✅ (13.3+) | ✅ (6.2+) | ★★★★☆ (kein UART benötigt) |
Warnung:
Kostengünstige Entwicklungsplatinen verwenden oft grenzwertige USB-UART-Chips oder SPI-Flash-Speicher von geringer Qualität. Probleme treten häufig auf 115200 Baud. Überprüfen Sie die Flash-Identität mit:
- Kernversion: Festgelegt auf v2.0.17 (oder explizit dokumentiert bei Verwendung von v3.x)
- USB-Anschluss Verifizierte Datenfähigkeit (nicht nur Laden)
- Fahrer WinUSB/Zadig unter Windows; ordnungsgemäße udev-Regeln unter Linux
- Partitionierschema Entspricht der tatsächlichen Flash-Größe (2 MB vs. 4 MB)
- Kabel Kurz, geschirmt, 24 AWG oder dicker
- Leistung ≥500 mA bei 5 V; Messung an ESP32 VCC
- Schaltung zurücksetzen ~10 µF Kondensator von EN → GND für zuverlässiges Auto-Reset
Die Installation des ESP32 ist kein einfaches Anklicken von “Installieren”.”
Es geht um die Kontrolle des gesamten Toolchain-Stacks – vom USB-Silizium bis zu den Partitionstabellen.
Die robustesten Implementierungen betrachten die IDE nicht als Blackbox. Sie betrachten sie als Konfigurierbare PipelinePinnen Sie Ihre Versionen, validieren Sie Ihre Hardware und automatisieren Sie Ihren Flash-Prozess.
Denn im Feld gibt es keinen Knopf für “Arduino neu installieren” – nur einen Techniker mit einem Multimeter, einer defekten Einheit und einem Abgabetermin.
Das ist auch der Grund, warum Teams, die in großem Maßstab arbeiten, der Hardware im Upstream-Bereich große Aufmerksamkeit schenken.
Konsequente Flash-Größen, zuverlässige USB-zu-Seriell-Chips und ein stabiles Stromversorgungsdesign sind ebenso wichtig wie sauberer Code. PCBCool, Dies sehen wir täglich, während wir Ingenieure bei der Entwicklung von Prototypen und der Produktion von Leiterplatten für den realen Einsatz unterstützen, nicht für Labortische.