Die meisten Projekte mit Mikrocontrollern beginnen sehr einfach, indem sie Sensoren auslesen, LEDs ein- und ausschalten oder Daten über eine serielle Schnittstelle übertragen. Mit zunehmender Projektgröße treten jedoch sogenannte Overhead-Aktivitäten wie drahtlose Kommunikation, Echtzeit-Datenerfassung, Benutzeroberflächen und Datenverarbeitung zunehmend in Konkurrenz zur CPU-Zeit. Hier ist die Dual-Core-Architektur des ESP32 ein großer Vorteil.
Der ESP32 verfügt über zwei unabhängige Prozessorkerne (im Vergleich zu gängigen Single-Core-Mikrocontrollern), die die gleichzeitige Ausführung zweier Aufgaben ermöglichen. Dies sollte Entwicklern ermöglichen, reaktionsschnellere, stabilere und skalierbarere Systeme zu entwickeln, ohne auf eine völlig neue Toolchain umsteigen zu müssen, wenn diese im Arduino-Setup korrekt verwendet werden.
Dieses Paper diskutiert den dualen ESP32-Kern unter der Arduino IDE und legt besonderes Augenmerk auf praktische Einblicke, reale Implementierungspläne und Fallstricke, ohne das Thema in ein Low-Level-RTOS-Codehandbuch zu verwandeln.
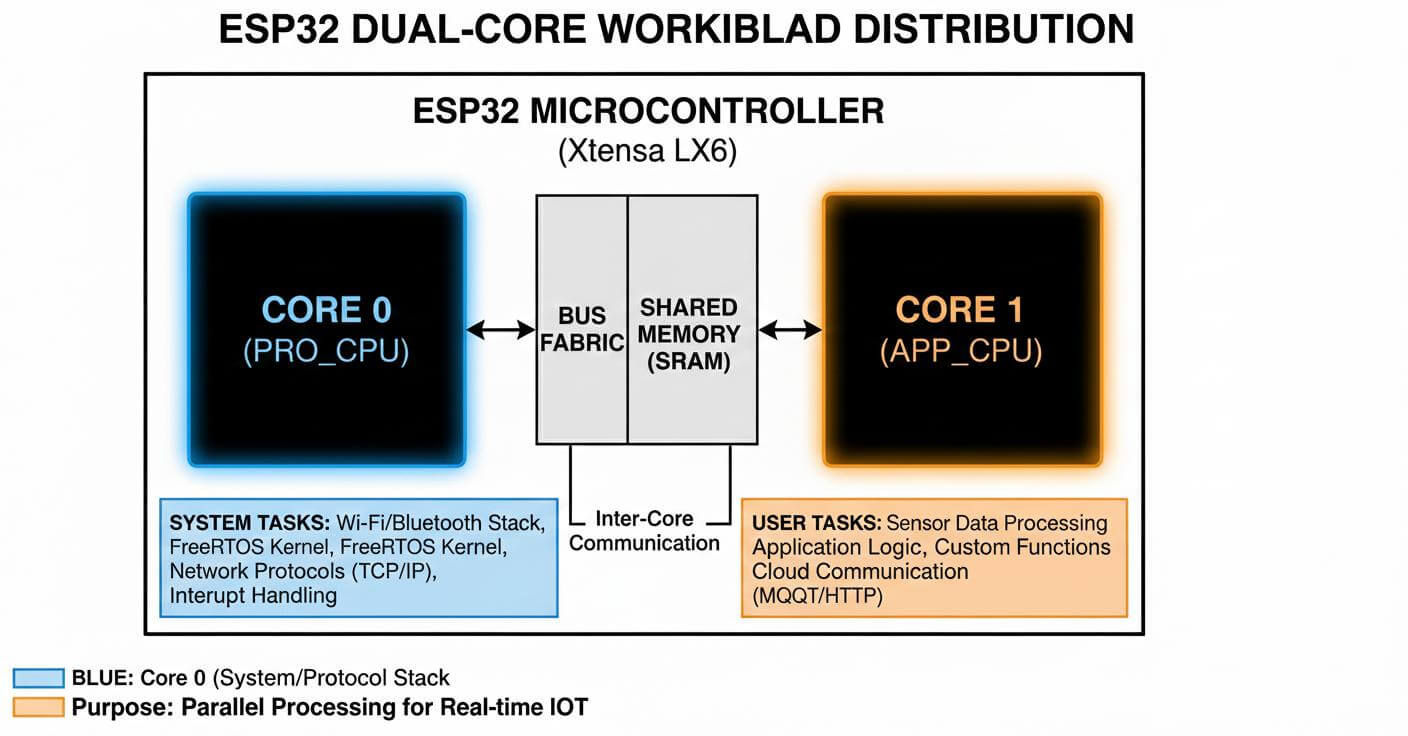
Der ESP32 verfügt über zwei unabhängige, aber teilbare Speicher- und Peripherie-Tensilica-Prozessorkerne. Das System verfügt über ein internes Management von Multitasking, Scheduling und Inter-Core-Koordination mittels FreeRTOS.
In den meisten ESP32-Konfigurationen:
- Kern 0 behandelt hauptsächlich systemweite Operationen wie WLAN, Bluetooth und Hintergrunddienste.
- Kern 1 wird typischerweise für die Logik von Benutzeranwendungen verwendet.
Mit dem Arduino-Framework, das auf den ESP32 angewendet wird, wird ein großer Teil dieser Komplexität beseitigt. Standardmäßige Setup- und Loop-Funktionen werden bereits als Teil von FreeRTOS-Tasks verwendet. Dennoch können Entwickler weitere Tasks hinzufügen und sie einem bestimmten Core zuweisen, wenn eine fein abgestimmte Kontrolle erforderlich ist.
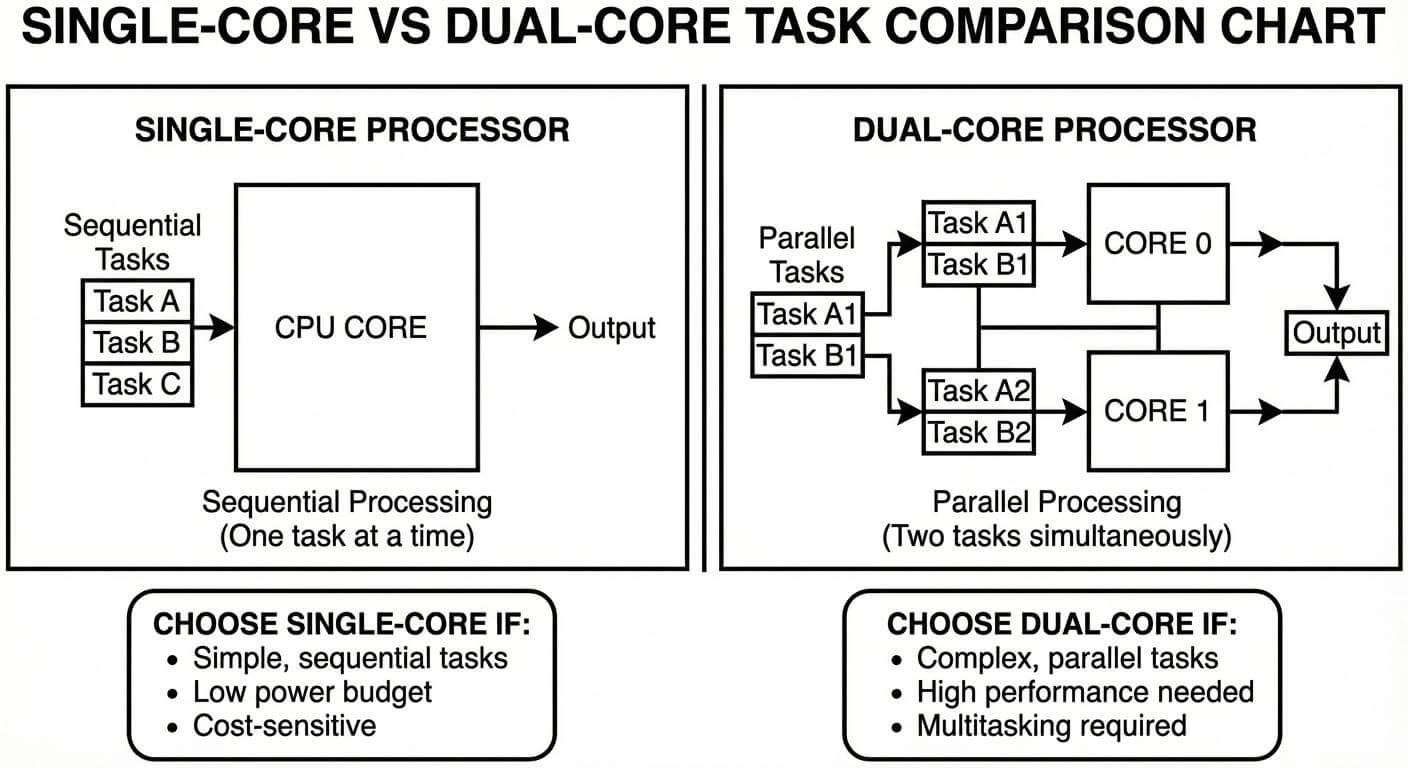
Dual-Core-Prozessoren sind leistungsstark, aber nicht immer notwendig. Zu verstehen, wann sie eingesetzt werden sollten, hilft, unnötige Komplexität zu vermeiden.
Gute Anwendungsfälle umfassen:
- Erschließung von Sensor-Daten unabhängig von der WLAN-Kommunikation
- Echtzeitsteuerung bei gleichzeitiger Aktualisierung einer Anzeige
- Zeitkritische Aufgaben von Hintergrundprotokollierung trennen
- Verbesserung der Reaktionsfähigkeit in IoT-Anwendungen
Fälle, in denen Dual-Core möglicherweise nicht benötigt wird:
- Einfache Sensor-Lese-Projekte
- Aufzeichnung von Daten bei niedrigen Frequenzen
- Anwendungen mit minimalen Zeitbeschränkungen
Die Nutzung von Dual Core sollte eine Designentscheidung sein und keine Standardwahl. Übermäßige Nutzung kann Synchronisationsprobleme einführen, die in Single-Loop-Designs nicht existieren.
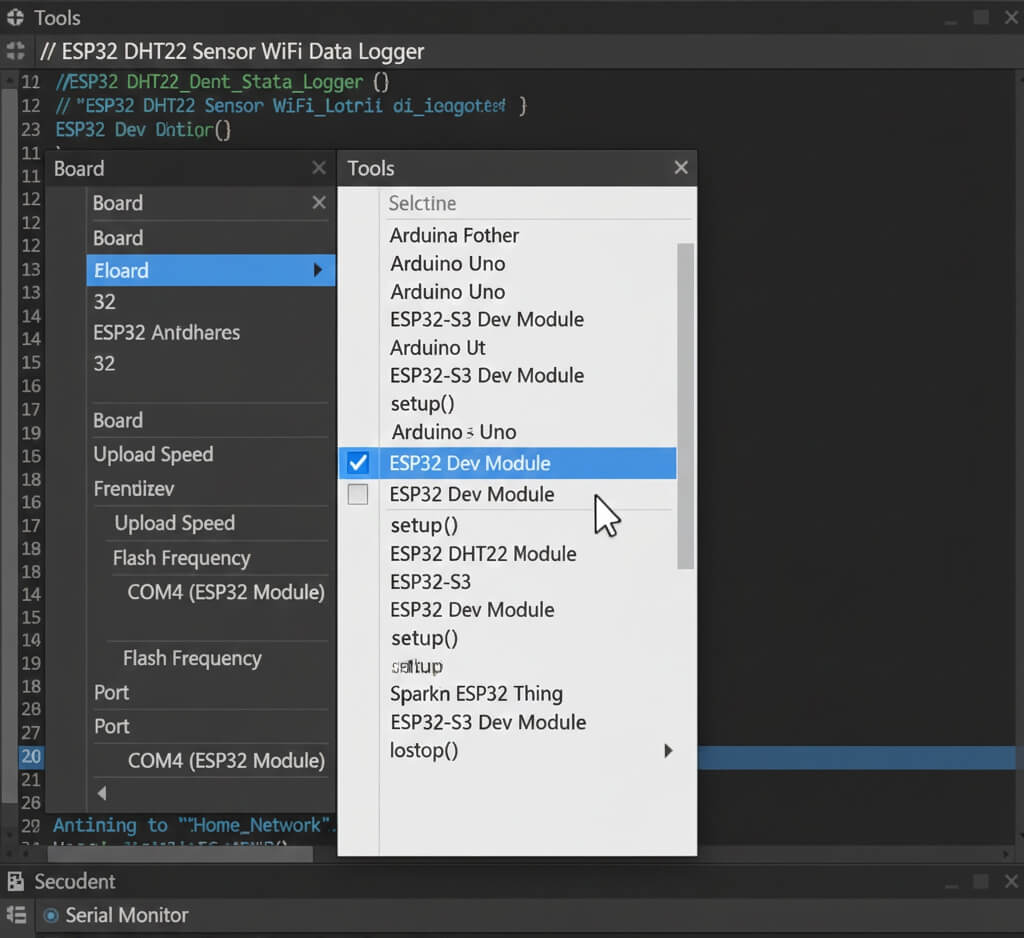
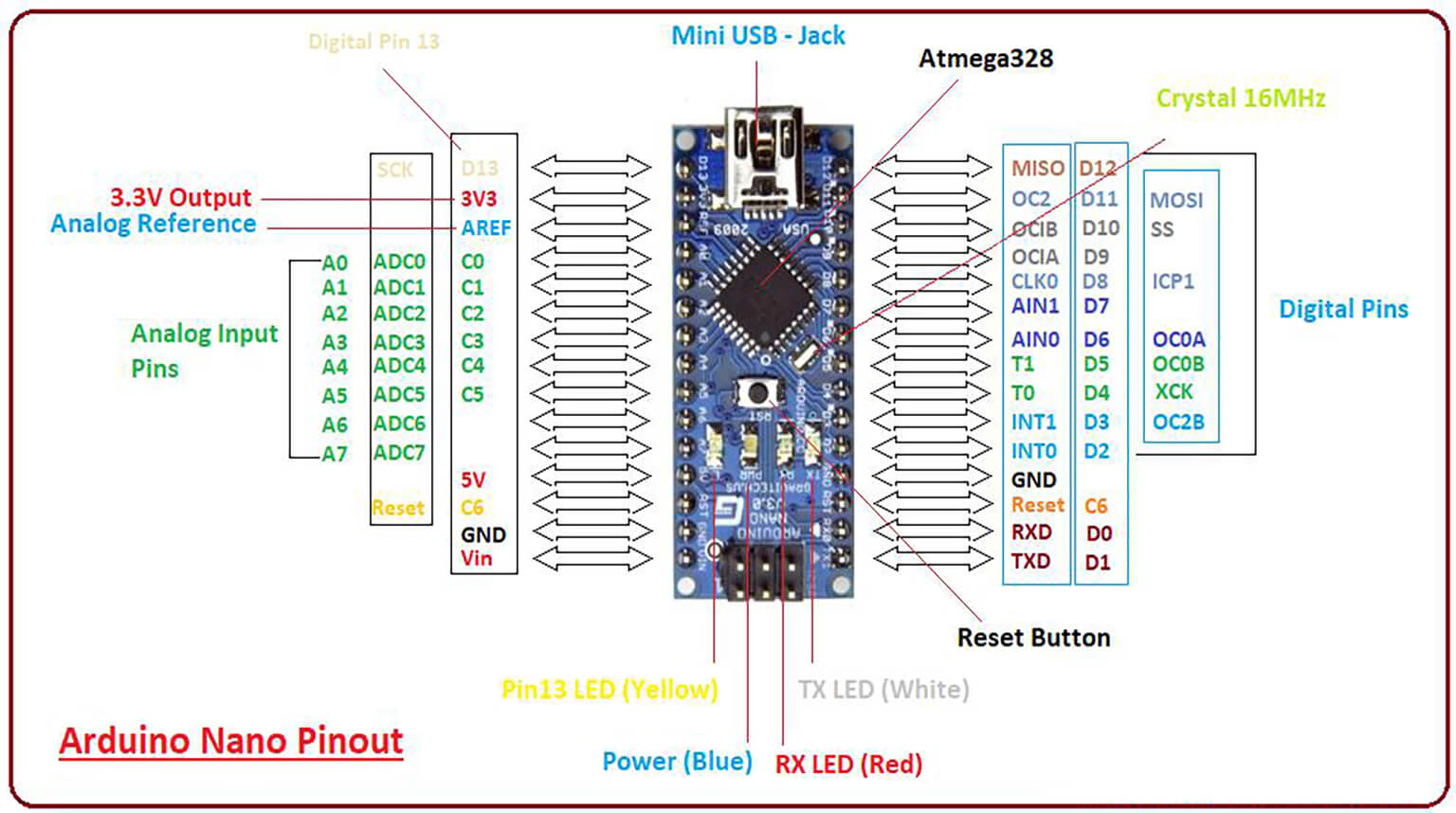
Zuerst muss das Paket ESP32 Board in der Arduino-Umgebung installiert werden. Der ESP32 ist mit dem Arduino kompatibel, da der Benutzer ihn ähnlich wie ein Arduino-Board verwenden kann.
Die Arduino IDE ist ein Programm, das automatisch auf dem ESP32 mit dem FreeRTOS-System ausgeführt wird. Die Dual-Core-Unterstützung erfordert keine spezielle Konfiguration zur Aktivierung.
Wichtige Einrichtungsüberlegungen umfassen:
- Auswahl der richtigen ESP32-Board-Variante
- Standard-Flash- und Partitionseinstellungen verwenden, es sei denn, eine erweiterte Speichernutzung ist erforderlich
- Serielle Ausgabe zur frühen Fehlersuche aktivieren
Zu diesem Zeitpunkt ist das System bereits zu Multitasking fähig, auch wenn die Skizze einfach erscheint.
Im klassischen Arduino-Sketch wird jede Logik innerhalb von loop() ausgeführt. Und beim ESP32 ist loop() an sich eine FreeRTOS-Task, die an einen Core gebunden ist.
Um die Dual-Core-Fähigkeit zu nutzen, entwickeln Entwickler mehr Aufgaben, die:
- Unabhängig von loop() ausführen
- Kann Core 0 oder Core 1 zugewiesen werden
- Auf unterschiedlichen Prioritätsstufen arbeiten
Es gibt einen Stack und einen Ausführungskontext für jede Aufgabe, und es ist möglich, diese in realer paralleler Weise zu nutzen. Es ist nun möglich, Sensorabfragen kontinuierlich auszuführen, während die Kommunikation oder UI-Updates blockierungsfrei laufen.
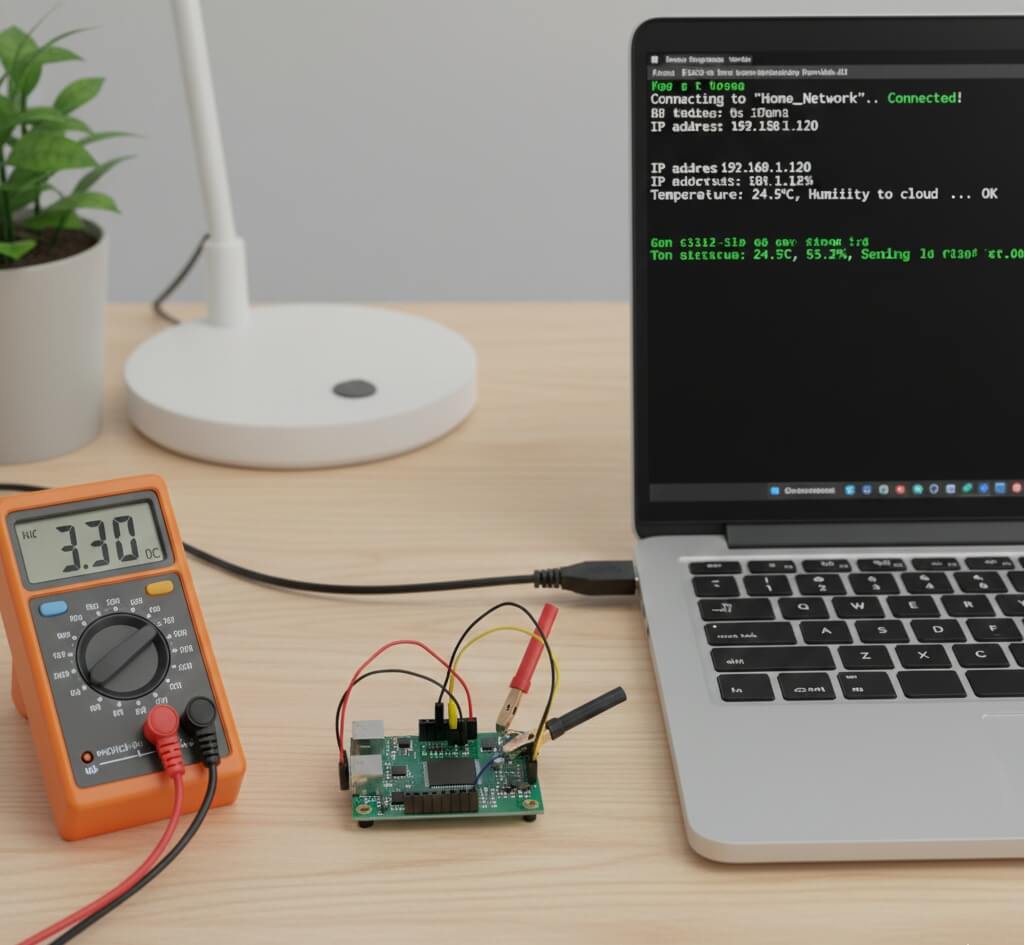
Als Beispiel für eine praktische Anwendung kann ein Selbstbau-ESP32-Projekt dienen, das Sensoren auslesen und Daten über das WLAN-Netzwerk übertragen kann.
Die Anwendung ist in logische Verantwortlichkeiten unterteilt:
- Aufgabe A: Liest Sensordaten in festen Intervallen
- Aufgabe B Verwaltet die WLAN-Kommunikation und Datenübertragung
Diese Isolierung verhindert, dass eine langsame Netzwerkoperation zeitkritische Erfassungen unterbricht.
Die Sensorwerte werden normalerweise auf Core 1 gelegt, während die Kommunikation je nach Systemauslastung auf Core 0 oder Core 1 erfolgen kann. Die Auswahl der Stackgröße und der Priorität erfolgt, um Abstürze oder Ressourcenverknappung zu vermeiden.
Eine solche Strategie macht das System auch bei erheblichem Kommunikationsverkehr reaktionsfähig.
Die Fähigkeit, gemeinsam genutzte Ressourcen sicher zu nutzen, ist im Dual-Core-Programmieren von entscheidender Bedeutung. Da beiden Kernen der Zugriff auf den Speicher gestattet ist, kann ein unverantwortliches Design zu unvorhersehbarem Verhalten führen.
Zu berücksichtigende Kernpunkte sind:
- Schutz von gemeinsam genutzten Variablen
- Vermeidung des gleichzeitigen Zugriffs auf Hardware-Peripheriegeräte
- Verwaltung der seriellen Ausgabe zur Vermeidung von Nachrichtenbeschädigung
Race conditions können ohne unverhältnismäßigen Mehraufwand durch einfache Synchronisationsmethoden beseitigt und die Konsistenz von Daten gewährleistet werden.
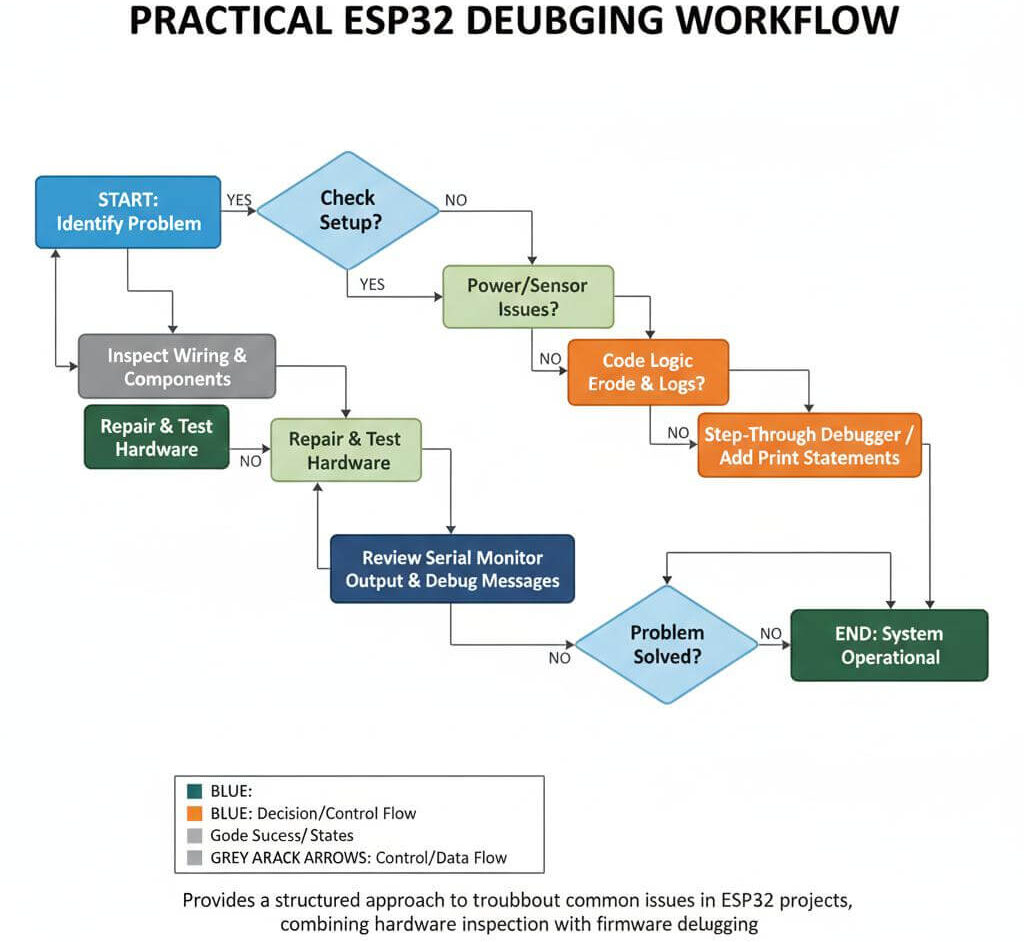
Entwickler, die neu bei Dual-Core-ESP32-Projekten sind, stoßen oft auf ähnliche Probleme:
- Zufällige Neustarts aufgrund unzureichender Stapelgröße
- Watchdog-Timer löst aufgrund von blockierendem Code aus
- Aufgaben mit falschen Prioritäten, die andere verdrängen
- Strominstabilität während der WLAN-Übertragung
Diese Probleme werden mithilfe von systematischem Debugging isoliert. Serielles Logging, Task-Isolation und inkrementelles Testen können insbesondere bei Multi-Core-Systemen erfolgreich sein.
Um den größtmöglichen Nutzen aus dem Dual-Core-Betrieb des ESP32 zu ziehen:
- Weisen Sie zeitkritische Aufgaben einem eigenen Kern zu.
- Lange blockierende Verzögerungen vermeiden
- Verwenden Sie Multitasking anstelle von Interrupts, wo dies angebracht ist
- Stromverbrauch unter Last überwachen
Die Nutzung des Dual-Core sollte auch die Reaktionsfähigkeit verbessern und nicht nur die Komplexität erhöhen.
Dual-Core-Systeme sollten über die grundlegende Funktionalität hinaus getestet werden. Die Validierung umfasst:
- Langzeit-Laufzeittests
- Stresstest mit kontinuierlichem WLAN-Datenverkehr
- Messung der zeitlichen Genauigkeit von Sensoren
- Sicherheitsüberprüfung der Systemwiederherstellung nach Netzwerkunterbrechungen
Diese Tests bestätigen, dass die Aufgaben über die Zeit stabil und synchron bleiben.
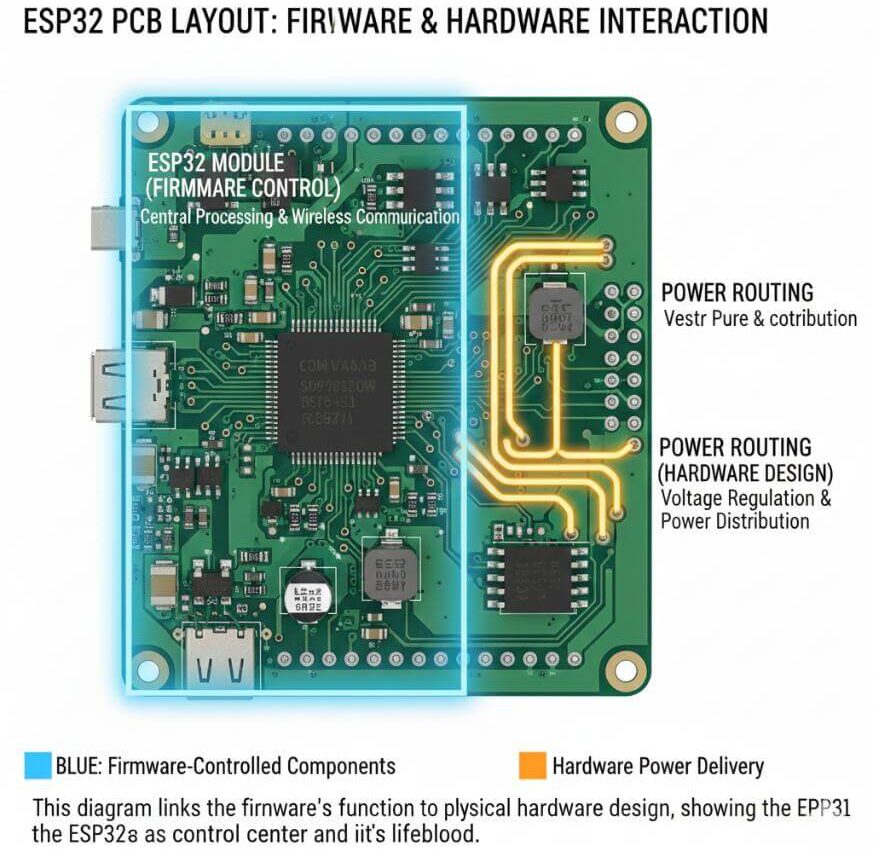
Bei einem Dual-Core-ESP32-Projekt, das auf eine Leiterplatte (PCB) übertragen wird, wird das Hardware-Design direkt von Firmware-Entscheidungen beeinflusst. Das Multitasking ist im Hinblick auf die Zuweisung der GPIOs, das Power-Routing und den Zugriff auf das Debugging zu berücksichtigen.
Wichtige Überlegungen zu Leiterplatten umfassen:
- Design stabiler Stromversorgungen
- Angemessene Entkopplung in der Nähe des ESP32
- Testpunkte zum Debugging
- Klare Trennung empfindlicher Signale
Die Dual-Core-Anwendungen sind wahrscheinlicher anspruchsvoll in Bezug auf die Stromintegrität, und somit ist die PCB-Qualität für sie sehr bedeutsam.
Die erfolgreiche Nutzung des ESP32 Dual-Core erfolgt in der Arduino-Umgebung, was es den Entwicklern ermöglicht, zuverlässigere, reaktionsschnellere und skalierbarere eingebettete Systeme zu erstellen. Durch Kenntnisse der Aufgabenplanung auf die Kerne können gemeinsam genutzte Ressourcen effizient eingesetzt werden, und gründliche Tests stellen sicher, dass die Dual-Core-Verarbeitung kein komplexes Werkzeug darstellt.
Die Dual-Core-Unterstützung des ESP32, die Arduino-Nutzern zur Verfügung steht, die bereit sind, von Single-Loop-Designs abzuweichen und zu leistungsfähigeren und fähigeren Designs überzugehen, ist ein effektiver nächster Schritt mit der richtigen Firmware-Organisation und guten PCB-Designpraktiken.