Cada año, reviso aproximadamente 200 registros de implementación de ESP32 de startups, universidades y equipos industriales. Solo en 2024, El 681 % de los “fallos de hardware” notificados se debieron a una configuración incorrecta del IDE—no son placas defectuosas, ni código erróneo, sino lagunas en la cadena de herramientas: núcleos obsoletos, tablas de partición desajustadas, problemas de negociación de puertos USB-C, o conflictos silenciosos entre Python 2/3.
La mayoría de las guías de “Cómo instalar ESP32” se detienen en Herramientas → Placa → ESP32 Arduino—y te dejan varado cuando las cargas se cuelgan, el Monitor Serie imprime basura o una actualización OTA deja el dispositivo inutilizable.
Esta guía se centra en lo que realmente funciona en producción:
- Instalación sin conjeturas para Windows, macOS y Linux
- Clasificación de puertos USB-C vs. USB-A (sí, el Tipo-C realmente importa)
- Control de versiones principal: porque v2.0.14 ≠ v3.0.0
- Procesamiento automático para despliegues de campo
- Depuración de flujos de trabajo que evitan el bucle interminable de desplazamiento en foros
No hay teoría. Solo lo que sobrevive al polvo de Nairobi, a las cámaras de EMC europeas y al caos de los laboratorios de estudiantes.
El Administrador de Placas de Arduino muestra una sola entrada, pero detrás de ella se esconden múltiples núcleos divergentes:
- Núcleo ESP32 para Arduino (v1.x–v2.x)
Legado, ampliamente desplegado, peculiaridades conocidas de PSRAM
- ESP32 Arduino Core (IDF v5+) (v3.0+)
ESP-IDF 5.x base con cambios que rompen la compatibilidad (ej. WiFi.h → WiFiClass.h)
- Forks de la comunidad (por ejemplo, loboris, Hristo Gochkov)
Pilas USB más rápidas, pero OTA y soporte a largo plazo limitados
Fracaso real:
Un equipo se actualizó desde el núcleo 2.0.13 → 3.0.2. Sus llamadas analogWrite() se compilaron, pero produjeron un Ciclo de trabajo 0%. La API PWM cambió de un envoltorio implícito de ledcWrite() a un mapeo de canales estricto. Las unidades de campo quedaron en desuso.
Pro Fix:
Fija la versión principal en boards.txt o en los scripts de CI:
Matriz de comparación de características de la versión principal (v2.0.17 vs. v3.0.2)
| Característica | ESP32 Arduino Core v2.0.17 (IDF 4.4) | ESP32 Arduino Core v3.0.2 (IDF 5.1+) | Impacto en el campo |
|---|
| Comportamiento del ADC | analogRead() utiliza controlador heredado; ADC1/ADC2 comparten calibración | ADC1/ADC2 usan unidades SAR ADC independientes; calibración separada | ❗ analogRead(36) devuelve 0 en v3.x si Wi-Fi/BT está habilitado (ADC2 bloqueado por RF). Se debe llamar explícitamente a adc1_config_width(). |
| Inicialización de PSRAM | Auto-inicialización detectada; psramFound() fiable | Requiere heap_caps_add_region() explícito en particiones personalizadas | ❗ Las placas con PSRAM pueden mostrar fallos aleatorios o errores de malloc en la v3.x si la partición no reserva memoria heap. |
| API PWM (ledc) | analogWrite(pin, value) envuelve ledcWrite() con configuración de canal automático | analogWrite() obsoleto; se requiere ledcSetup()/ledcWrite() | ❗ El código antiguo `analogWrite(5, 128)` se compila, pero genera un ciclo de trabajo de 0% — no hay ningún canal configurado. |
| Esquema de partición predeterminado | default_4MB.csv (1.3 MB de app, 3 MB de SPIFFS) | default_4MB.csv → aplicación de 1.9 MB, SPIFFS de 0.2 MB (prioridad OTA) | ❗ Los archivos grandes de SPIFFS (por ejemplo, HTML, certificados) desbordan → bucle de arranque. Se debe cambiar a huge_app o custom. |
| Coexistencia WiFi/BT | Deshabilitado por defecto (CONFIG_BT_ENABLED=n) | Habilitado por defecto (CONFIG_BT_ENABLED=y) | ❗ Ruido del ADC ↑ 4–6× en VP/VN (GPIO36/39); fallos I²C cerca de GPIO2/15. |
| Resistencias pull para GPIO 34–39 | pinMode(34, INPUT_PULLUP) ignorado silenciosamente | Advertencia del compilador (desde v2.0.14); no-op en tiempo de ejecución | ✅ Más seguro: previene la falsa confianza en pines solo de entrada. |
| Retención del Sueño Profundo | Memoria RTC con retención automática | Requiere rtc_user_mem_write() + esp_sleep_pd_config() | ❗ Calibración del sensor perdida después de suspensión en v3.x a menos que se preserve explícitamente. |
| USB CDC (Solo ESP32-S3) | No soportado en el núcleo de Arduino | Serie nativa sobre USB (no se necesita UART) | ✅ Gran victoria para S3 dev — pero requiere USB_CDC_ENABLED=y en menuconfig. |
✅ = Mejora | ❗ = Cambio disruptivo / riesgo de fallo | ⚠️ = Cambio de comportamiento que requiere actualización de código
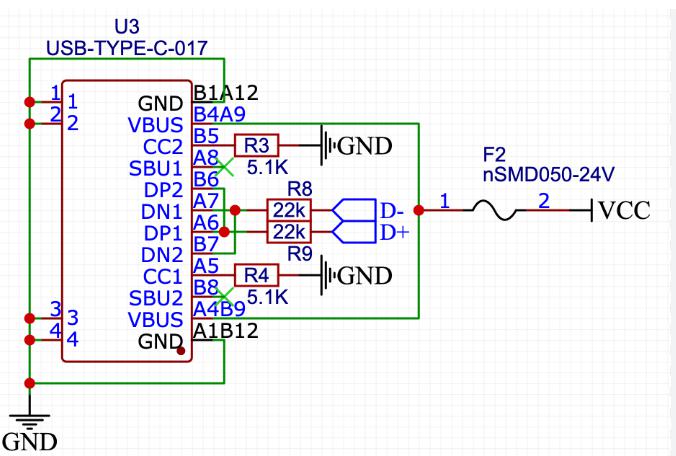
No todos los puertos USB-C admiten tanto energía como datos USB 2.0. Muchas computadoras portátiles (Dell XPS, MacBook Pro serie M) exponen puertos Tipo-C que priorizan la carga o modos alternativos, con D+/D− no enrutados como se esperaba.
Prueba del osciloscopio
Las líneas USB D+/D− se quedaron planas en un puerto solo de carga. El IDE agotó el tiempo de espera esperando el paquete de sincronización.
Pro Fix:
- Windows Reenlace CP210x / CH340 a WinUSB usando Zadig (no usbser)
- macOS: Desactivar el modo restringido de USB (Seguridad → Herramientas para desarrolladores)
- Linux Añadir una regla udev:
Luego recargar las reglas:
Las particiones.csv predeterminadas asumen Memoria flash de 4 MB. Muchas placas de bajo costo se envían con 2 MB (Módulos ESP-01S, algunas variantes WROOM de AliExpress). La carga tiene éxito y luego ESP.restart() provoca un bucle de arranque porque la partición OTA se superpone con la aplicación.
Registro de seguimiento:
Pro Fix:
Validar el tamaño de la partición antes de flashear.
- IDE: Herramientas → Esquema de partición → “Mínimo (2 MB sin OTA)”
- O define un partitions.csv personalizado:
Colócala en la carpeta sketch; el IDE la detectará automáticamente.
| SO | Revisar | Herramienta / Comando |
|---|
| Todo | Python 3.8–3.11 (⚠️ no 3.12) | python --versión |
| Ganar | Herramientas de compilación de Visual Studio (2019+) | Descargar |
| macOS | Herramientas de línea de comandos | xcode-select --install |
| Linux | git, make, gcc, python3-venv | sudo apt install build-essential |
Crítico: Elimina todos los núcleos ESP32 antiguos antes de continuar.
- Abrir Archivo → Preferencias
- En URLs adicionales del Gestor de Placas, añadir:
- Ir Herramientas → Placa → Administrador de placas
- Buscar“ESP32 de Espressif Systems”
- Instalar v2.0.17 (recomendado para estabilidad — no es la última versión)
- Reiniciar el IDE
Para compilaciones reproducibles (por ejemplo, GitHub Actions), usa arduino-cli:
Ejemplo de compilación y carga (las opciones de la placa pueden variar según el destino):
| Síntoma | Causa raíz probable | Solución comprobada |
|---|
| Ocurrió un error fatal: Falló la conexión con ESP32 | Circuito de auto-restablecimiento ausente o marginal | Sostener ARRANQUE + RESTABLECER, libere RESET, luego BOOT — o agregue un capacitor de ~10 µF desde EN → Tierra |
| Puerto serie no encontrado | Controlador no vinculado o puerto ya en uso | Uso USBDeview (Windows) o lsof /dev/ttyUSB0 (Linux/macOS) para identificar y eliminar procesos zombis |
| Se activó el detector de bajo voltaje | Cable USB defectuoso o puerto con poca energía | Utiliza un cable USB-A corto y grueso; evita los concentradores; verifica VUSB > 4.75 V en la placa (especialmente durante la transmisión Wi-Fi) |
| Error de suma de verificación SHA256 | Fallo de sincronización / modo del flash (común en módulos de bajo costo) | Configurar Herramientas → Modo Flash → DIO (no QIO); reducir Velocidad de subida a 115200 |
| Error de meditación de gurú: Núcleo 1 en pánico | Desbordamiento de pila o acceso inválido a memoria | Si se confirma un desbordamiento de pila, aumente el tamaño de la pila de la tarea (por ejemplo, ajuste las banderas del compilador o refactorice búferes locales grandes) |
Pro Insight:
Activar Salida detallada (Archivo → Preferencias), luego inspecciona los registros de esptool.py para determinar exactamente en qué fase de carga falla (sincronización, borrado, escritura o verificación).
La transferencia OTA predeterminada de Arduino transfiere la imagen completa del firmware, lo que puede ser arriesgado en enlaces Wi-Fi inestables. Para mejorar la confiabilidad, use OTA por fragmentos con verificación y manejo explícito de fallos:
Pro Insight:
Almacena un hash de firmware en NVS y verifícalo antes de reiniciar en la nueva imagen.
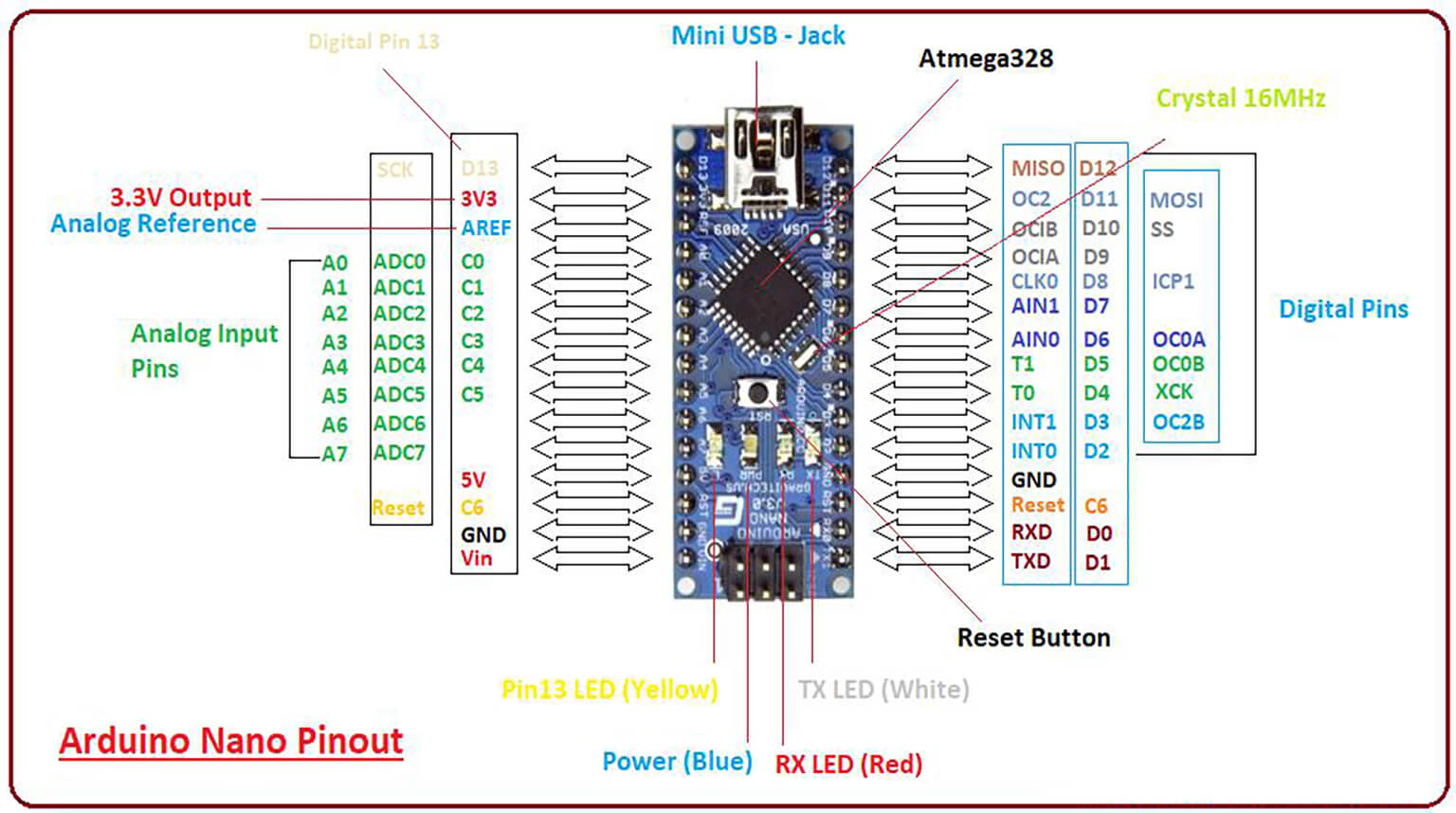
Para lotes de 100 unidades o más, usa esptool.py con una plantilla de flasheo:
Requisito de plantilla:
Los pines EN e IO0 deben ser autocontrolados (mediante relé o transistor) para un parpadeo manos libres (Fig. 2).
| Chip | VID:PID | Ventanas | macOS | Linux | Fiabilidad de campo |
|---|
| CP2102N | 10C4:EA60 | ✅ (Silabs) | ✅ nativo | ✅ | ★★★★★ |
| CH340G | 1A86:7523 | ✅ (WCH) | ⚠️ macOS más antiguo necesita kext | ✅ | ★★★☆☆ (sensible al ruido) |
| FT232RL | 0403:6015 | (FTDI) | ✅ | ✅ | ★★★★☆ (caro) |
| ESP32-S3 USB CDC | varía | ✅ (Win11+) | ✅ (13.3+) | ✅ (6.2+) | ★★★★☆ (no se necesita UART) |
Advertencia:
Las placas de desarrollo de bajo costo a menudo usan chips USB-UART marginales o memorias flash SPI de baja calidad. Los problemas aparecen frecuentemente por encima 115200 baudios. Verifica la identidad del flash con:
- Versión principal: Corregido en v2.0.17 (o documentado explícitamente si se usa v3.x)
- Puerto USB: Datos verificados capaces (no solo carga)
- Controladores WinUSB/Zadig en Windows; reglas udev adecuadas en Linux
- Esquema de particiones: Coincide con el tamaño real del flash (2 MB vs. 4 MB)
- Cable Corto, blindado, de calibre 24 AWG o más grueso
- Poder ≥500 mA @ 5 V; medir en VCC del ESP32
- Restablecer ~10 µF capacitor de EN → GND para reinicio automático fiable
Instalar el ESP32 no se trata de hacer clic en “Instalar”.”
Se trata de controlar toda la cadena de herramientas, desde los chips USB hasta las tablas de particiones.
Las implementaciones más robustas no tratan el IDE como una caja negra. Lo tratan como un tubería configurable: fija tus versiones, valida tu hardware y automatiza tu proceso de flasheo.
Porque en el campo, no hay un botón de “Reinstalar Arduino”, solo un técnico con un multímetro, una unidad defectuosa y una fecha límite.
Esa es también la razón por la que los equipos que trabajan a escala prestan mucha atención al hardware en upstream.
Un tamaño de memoria flash uniforme, unos chips USB-serie fiables y un diseño de alimentación estable son tan importantes como un código limpio. En PCBCool, vemos esto a diario mientras apoyamos a los ingenieros con prototipos y PCBs de producción construidos para despliegue en el mundo real, no para bancos de laboratorio.